Verkauf der preccon Robotics GmbH

Auszeichnung von iMS-ROBOTERKALIBRIERUNG 4.0 mit dem 2. Platz des Handling Award in der Kategorie Manipulatoren auf der Motek 2018.

Motek 2018 – Handling Award
Auszeichnung von iMS-ROBOTERKALIBRIERUNG 4.0 mit dem MM Award in der Kategorie Industrieroboter auf der Automatica 2018

Automatica 2018 – MM Award
Weiterentwicklung des Roboterkalibriersystems ROSY durch die teconsult zu ROSY LS.

ROSY LS
Entwicklung des Messsystems iMS-ROBOTERKALIBRIERUNG 4.0

iMS Control Box
Auszeichnung mit dem 3. Platz des Robotics Award 2014 mit der Applikation Reifenproduktion mit Robotern.

Verleihung des Robotics Award 2014
Erster Auftrag von Continental Reifen Deutschland. Anlage zur hochflexiblen Fertigung von Prototypenreifen. Arbeiten mit CAD-Daten, automatischen Einmessen der Werkzeuge, Werkstücke Einmessen der externen Achsen, Arbeiten mit absolut genauem Roboter.
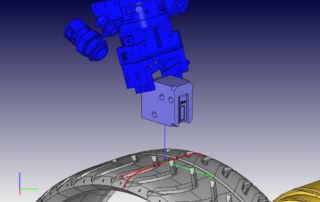
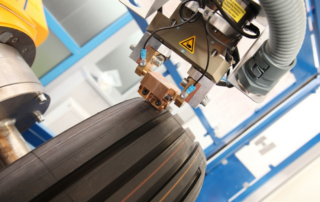
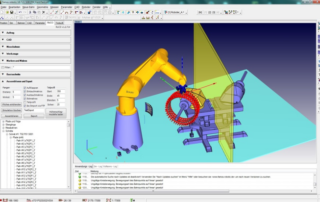
Reifenschnitzen mit Roboter einschließlich Offline-Programmierung